中国の自動化部門が「エラーゼロ」を達成!!!
工場の背景: 高精度製造が「最終段階」で行き詰まっている
ドイツのミュンヘンに拠点を置く精密機械工場は、高精度のトランスミッション コンポーネントの生産を専門とし、複数の EU 諸国の顧客にサービスを提供しています。
工場には4台の研削盤が設置されており、高い加工精度を実現しています。しかし、この工場では、積み込み、積み降ろし、部品の仕分けといった後処理段階では、長い間手作業に依存しており、2 人の作業員が手作業で部品番号を確認し、仕分けを行っていました。
主要な問題点: 手動による仕分けは限界に達している
1.顧客の信頼を損なう高いミスピッキング率
この工場では 20 を超える部品モデルが製造されており、その多くは外観が似ており、比較的重いです。手作業による仕分けでは部品番号の読み間違いが多発し、誤配送率が月あたり約 10% に達していました。
国境を越えた返品と交換には費用がかかり、頻繁なエラーは配送の信頼性に対する顧客の信頼を直接損ないます。
2.高い人件費と繁忙期のプレッシャー
注文のピーク時には、仕分け作業が非常に集中します。従業員は頻繁に午後 8 時までの残業を要求され、人件費が上昇していましたが、依然としてミスゼロは保証されていませんでした。
3.管理とトレーサビリティの欠如
選別プロセスは個人の経験に大きく依存していました。エラーが発生すると、問題の原因を特定するのが難しく、プロセスにはデータ主導の管理と追跡可能性のフレームワークが欠けていました。
ソリューション: 中国の自動機械の積み込み、積み下ろし、仕分けユニット
「生産ラインを大幅に変更せずに誤納品をなくしたい」というお客様の中心的な要件を満たすために、当社は工作機械用の自動ロード、アンロード、仕分けユニットを提供しました。

ソリューションの主要コンポーネント
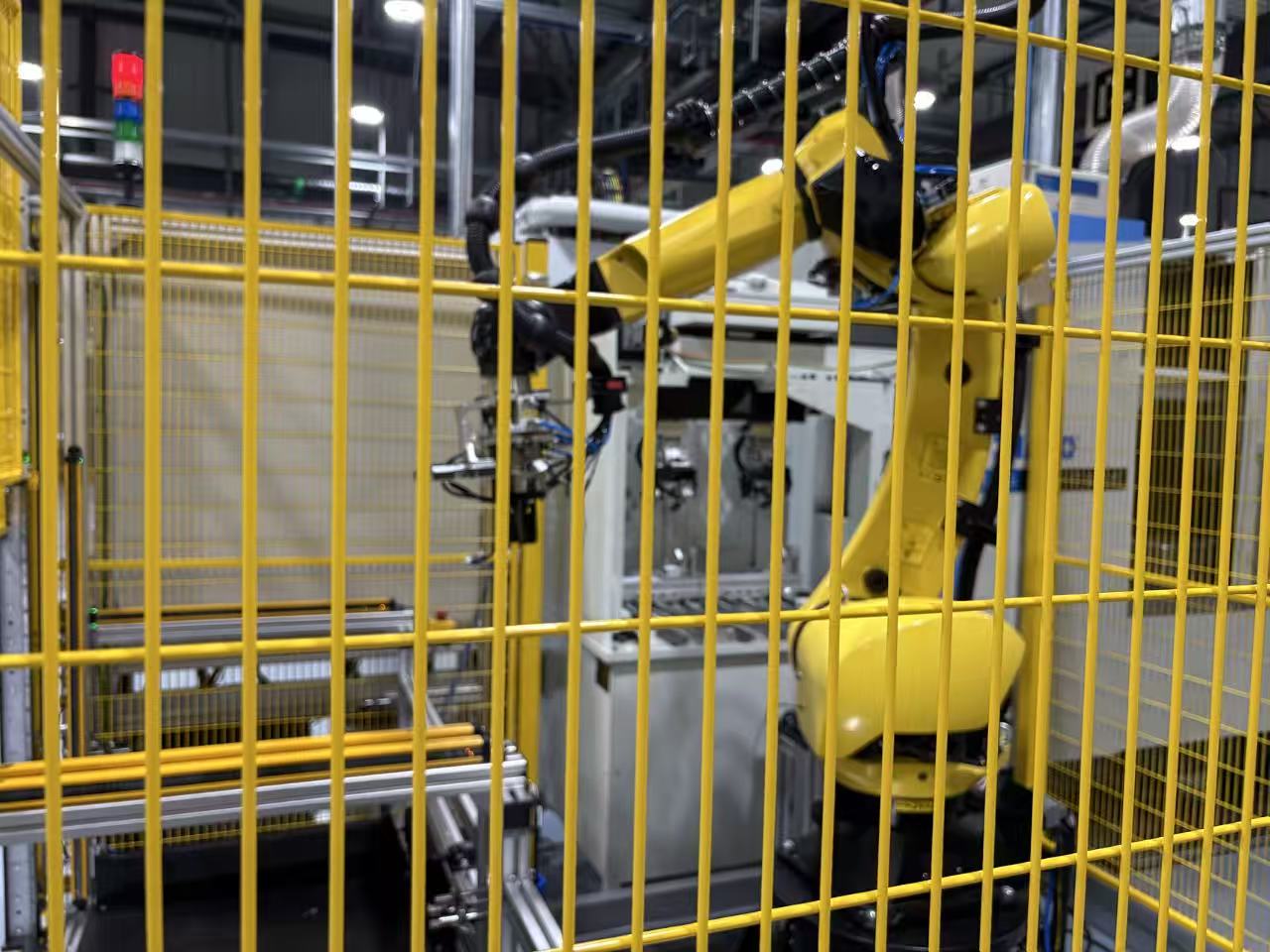
- ロボットによる自動ロードとアンロード、研削盤のサイクルとシームレスに同期
- 部品モデルの特徴を自動的に識別し、人間の認識エラーを排除する視覚センサー
- 視覚信号に基づいて部品を指定の箱に正確に仕分けし、混合モデルの生産を可能にするロボット
- 個々の部品の処理と仕分けの経路を自動的に記録し、全工程のトレーサビリティをサポートするソフトウェア システム
- 自動化ユニットは既存の研削盤と直接接続できるため、機械本体に変更を加える必要がなく、迅速な導入が可能になります
実装結果
- 部品の誤納品率が約 10% から 0 に減少し、真の「エラーゼロ」を達成
- バッチあたりの仕分け時間が 2 時間から 20 分に短縮
- 元の 2 つの並べ替え演算子は、他の付加価値タスクに再割り当てされました
- 毎月の人件費を約 2,000 ユーロ削減
顧客価値の概要
自動仕分けユニットの導入により、工場は経験ベースの手動仕分けからシステム主導の視覚ベースの識別に移行することに成功しました。このソリューションにより、管理が複雑になることなく、配信の信頼性と運用効率が大幅に向上し、コストの高いヨーロッパの生産環境で運用されているメーカーに複製可能な自動アップグレード パスが提供されました。
よくある質問
Q1: ロボットによる自動積み下ろしにはライン全体の再設計が必要ですか?
いいえ。この場合、自動化ユニットは、機械の構造を変更することなく、既存の研削盤に直接接続されました。
Q2: ビジョンベースの並べ替えは、類似した外観の部品を確実に処理できますか?
はい。視覚センサーは、人間のオペレーターが一貫して区別することが難しい特定の幾何学的または表面の特徴を識別します。
Q3: このソリューションは大規模工場にのみ適していますか?
いいえ。これは、混合モデルと高い人件費により仕分けリスクが生じる中小規模の精密工場に特に効果的です。
精密製造におけるロボット オートメーションの適用
寧波 Dilama Machinery では、既存の生産レイアウトを中断することなく測定可能な結果をもたらす実用的な自動化アップグレードを求めるメーカーをサポートします。
当社のソリューションは、ロボットによる自動積み下ろし、検査の統合、実際の製造上の制約に合わせた追跡可能なワークフローに重点を置いています。
